tcs是什么意思(tcs软件怎么用)
作者:汪晶
稍微有点百思特网汽车常识的朋友肯定都知道什么是TCS(Traction Control System),也就是牵引力控制系统,它的作用就是让动力输出匹配当前轮胎抓地力。如果动力输出过大,或者地面比较滑,那么车轮就会打滑,失去抓地力就是失控,会导致偏航,打方向车身完全不听话,这种情况会比较危险。
TCS如何工作?
TCS就是通过控制动力输出(配合ESP控制制动),避免主动(比如重踩油门)和被动(地面湿滑)的抓地力丢失导致车身失控。它的工作原理很简单,通过传感器检测到打滑后限制动力输出。

什么又是分布式?
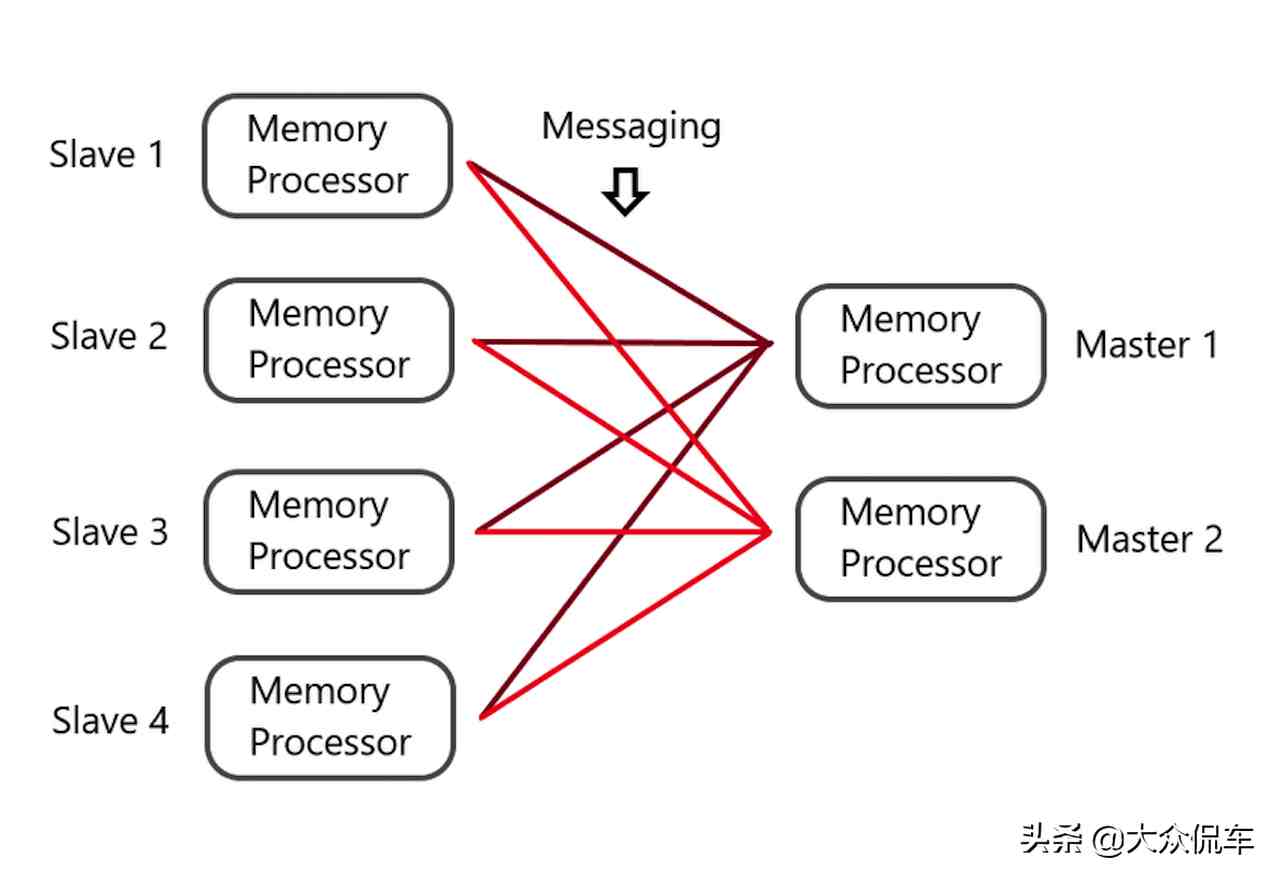
那么dTCS中的“d”又是什么呢?“distributed”也就是“分布式”,分布式对应的是集中式,简单来说,集中式就是一个系统要处理所有任务,分布式的一个特征就是可以把任务分为几个部分让子系统去处理。
TCS 分布式要摩擦出什么样的火花?
传统百思特网的TCS就是集中式的系统,在工作的时候,轮上传感器传递信号给IPB(包含TCS)进行决策,决策信息发到VCU(整车控制单元),再分发给MCU(电控系统)最后电控系统指挥电机降低扭矩输出。
而dTCS则是轮上传感器传递信号给IPB,接着直接丢给集成了dTCS的电控(MCU),然后再指挥电机降低扭矩输出。这里面的差别就是将TCS的决策的工作从IPB转移到了MCU。
两者具体的链路是:
TCS控制信号传递路线:IPB—VCU(整车控制器)—电控(MCU)—电机
dTCS控制信号传递路线:IPB—电控(MCU)—电机

这里面最能体现“分布式”精髓的就是电控(MCU)中集成了TCS功能,也就是原来IPB干的活让电控(MCU)系统就能干,最大的好处就是缩短了反射弧,让决策和执行的逻辑链更短。所以相比传统的TCS,dTCS具备更快的响应速度,传统TCS的控制时间一般为20ms,搭载dTCS的汉EV四驱版控制时间加快至1ms; 传统TCS的扭矩响应循环一般为100ms,搭载dTCS的汉EV四驱版相应时间可控制在10ms以内,这意味着系统可以在轮胎打滑时做出更快的调控,最大限度地减少车轮打滑量。
但是,传统的TCS不好吗,为什么要dTCS,可以看到dTCS的目标就是作动更快,为什么需要更快?这是因为电动车的动力输出和传统的燃油车不一样,最大的不一样就是扭矩输出。看下图,电动车一上来就是峰值扭矩输出,而传统燃油车的扭矩是随着转速逐渐达到峰值。这百思特网就决定了普通的TCS用在像汉EV这种强动力的EV车型上并不十分合适。

那么搭载了dTCS的汉EV变得有多强了?
汉EV四驱版在冰面上0-50km/h全油门加速时间加快了2s左右,雪面上0-60km/h全油门加速时间加快了0.8s左右。在冰雪圆环测试中,汉EV四驱版在低附路面最高可控过弯速度能提升约5-10km/h,扩展了弯道极限。

在实际体验中,无论是湿滑的瓷砖路面,还是半边湿滑,半边正常的路况,在dTCS的帮助下,无论怎么踩油门,汉EV都能够迅速获得抓地力,保持车身稳定。对于司机来说,这就意味着在湿滑路面上迅速抓地,避免失控。

dTCS会率先搭载在汉EV四驱版,并且后续会持续优化,车主们都可以通过OTA在线升级来获得(也可以到店升级),前驱、后驱和四驱车型都可以,纯软件层面的升级,硬件方面的条件只需要车辆搭载了博世的ESP 9.3或者10版本,或者IPB智能集成制动系统,就支持dTCS。

最后一句话总结,有了dTCS,这种适配于高性能EV的电控系统,极大的提升了驾驶安全性,不仅是在湿滑路面更从容,遇到紧急情况时还能还能够更快的恢复车身控制,无论是从驾控角度还是安全角度都极大的提升了车辆性能。



